Difference between revisions of "WS2024MSc2SAReferences"
(Created page with "__NOTOC__ __NOTITLE__ =='''Workshop MSc 2 SA'''== <br> 850px <div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; bo...") |
(→TEMPLATES) |
||
| (10 intermediate revisions by 2 users not shown) | |||
| Line 13: | Line 13: | ||
</div> | </div> | ||
<div style="float:left; width: 128px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | <div style="float:left; width: 128px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
| − | [[WS2024MSc2SAOnline|''' | + | [[WS2024MSc2SAOnline|'''Tutorials''']] |
</div> | </div> | ||
<div style="float:left; width: 128px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | <div style="float:left; width: 128px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
| Line 26: | Line 26: | ||
=='''PROJECTS'''== | =='''PROJECTS'''== | ||
| − | CS (http://cs.roboticbuilding.eu/index.php/Shared:2019Final and http://cs.roboticbuilding.eu/index.php/2019MSc3) | + | CS-wiki (http://cs.roboticbuilding.eu/index.php/Shared:2019Final and http://cs.roboticbuilding.eu/index.php/2019MSc3) |
<br> | <br> | ||
HB/ RB graduation projects (https://repository.tudelft.nl/islandora/object/uuid%3A25f7cc18-7400-4c65-a205-15530982d504, http://cs.roboticbuilding.eu/index.php/project02:P5), https://drive.google.com/drive/folders/18dBlk9IpK4tr-U6HJwMl2wcB52fAlb8J, and | HB/ RB graduation projects (https://repository.tudelft.nl/islandora/object/uuid%3A25f7cc18-7400-4c65-a205-15530982d504, http://cs.roboticbuilding.eu/index.php/project02:P5), https://drive.google.com/drive/folders/18dBlk9IpK4tr-U6HJwMl2wcB52fAlb8J, and | ||
https://repository.tudelft.nl/islandora/object/uuid%3A0461dd93-d335-4e43-b194-a035805176d6 | https://repository.tudelft.nl/islandora/object/uuid%3A0461dd93-d335-4e43-b194-a035805176d6 | ||
<br> | <br> | ||
| − | + | Cave.co.ke projects (https://www.cave.co.ke/origin) | |
<br> | <br> | ||
<br> | <br> | ||
| Line 51: | Line 51: | ||
<br> | <br> | ||
Hoekman, W. [http://cs.roboticbuilding.eu/images/7/7d/Regolith_as_future_habitat_construction_material_-_Willem_Hoekman.pdf Regolith as future habitat construction material] and bio chitinous manufacturing: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0238606 | Hoekman, W. [http://cs.roboticbuilding.eu/images/7/7d/Regolith_as_future_habitat_construction_material_-_Willem_Hoekman.pdf Regolith as future habitat construction material] and bio chitinous manufacturing: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0238606 | ||
| + | <br> | ||
<br> | <br> | ||
| + | |||
| + | ----- | ||
| + | |||
| + | =='''TEMPLATES'''== | ||
| + | |||
| + | Report: | ||
| + | <br>https://docs.google.com/document/d/1fNNps7UfgIfoOH8G0ar-5Bzz26-up8Y4/edit | ||
| + | <br><br> | ||
| + | Video & instructions: | ||
| + | <br>https://drive.google.com/file/d/1eb58-dR2yR7Ulc5dQq765uEKmdqVlVhV/view | ||
| + | <br> - In the zip file, check the file named 'AI_Msc2_Video Template. prproj' file, other files are just reference images and videos used for the template. | ||
| + | <br> - Replace the movies to keep the current effects on the video. | ||
| + | <br> - You will see the following titles on the template: '3D Printing', 'Design', 'Node', and 'Robotic Arm': These are just the sections in the template. You can also reach those sections by double-clicking from the general video section, which is 'Movie 1' | ||
| + | <br> - If you do not have the font used on the video on your laptop, upload those to your laptop/computer: settings > control panel > fonts. You(at least Windows users) can copy-paste the font to the 'fonts folder' on your laptop. | ||
| + | <br><br> | ||
| + | Archive: | ||
| + | <br>https://drive.google.com/file/d/1MsjV7GPDhpol1BUl02_tLhqz6iUiKADP/view | ||
| + | |||
| + | <br><br> | ||
| + | |||
| + | ----- | ||
| + | |||
| + | =='''EXAMPLES'''== | ||
| + | |||
<br> | <br> | ||
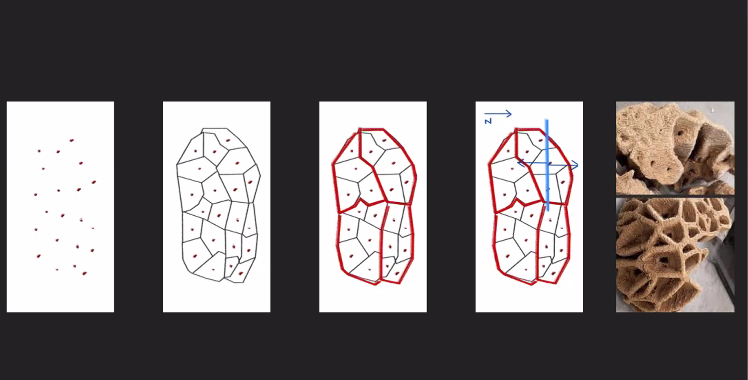
| − | + | Scalable porosity and componential logic: | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
<br> | <br> | ||
| + | [[File:Capture(204).png | 850px]] | ||
| + | [[File:Capture(208).png | 850px]] | ||
| + | [[File:Capture(215).png | 850px]] | ||
| + | [[File:Cl4.jpg | 850px]] | ||
| + | <br><br> | ||
| + | [[File:Screenshot 2021-02-24 at 16.06.35.png | 850px]] | ||
| + | |||
| + | <br><br> | ||
| + | |||
----- | ----- | ||
{kind=link}
Latest revision as of 09:10, 5 April 2024
Workshop MSc 2 SA

PROJECTS
CS-wiki (http://cs.roboticbuilding.eu/index.php/Shared:2019Final and http://cs.roboticbuilding.eu/index.php/2019MSc3)
HB/ RB graduation projects (https://repository.tudelft.nl/islandora/object/uuid%3A25f7cc18-7400-4c65-a205-15530982d504, http://cs.roboticbuilding.eu/index.php/project02:P5), https://drive.google.com/drive/folders/18dBlk9IpK4tr-U6HJwMl2wcB52fAlb8J, and
https://repository.tudelft.nl/islandora/object/uuid%3A0461dd93-d335-4e43-b194-a035805176d6
Cave.co.ke projects (https://www.cave.co.ke/origin)
READINGS
Bier, H., Khademi, S., van Engelenburg, C. et al. Computer Vision and Human–Robot Collaboration Supported Design-to-Robotic-Assembly. Constr Robot (2022). https://doi.org/10.1007/s41693-022-00084-1
Bier, H., Cervone, A., and Makaya, A. Advancements in Designing, Producing, and Operating Off-Earth Infrastructure, Spool CpA #4, 2021. https://doi.org/10.7480/spool.2021.2.6056
Pillan, M., Bier, H., Green, K. et al. Actuated and Performative Architecture: Emerging Forms of Human-Machine Interaction, Spool CpA #3, 2020. https://doi.org/10.7480/spool.2020.3.5487
Lee, S. and Bier, H., Aparatisation of/in Architecture, Spool CpA #2, 2019. https://doi.org/10.7480/spool.2019.1.3894
Bier, H. Robotic Building, Adaptive Environments Springer Book Series, Springer 2018 (https://www.springer.com/gp/book/9783319708652)
Hoekman, W. Regolith as future habitat construction material and bio chitinous manufacturing: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0238606
TEMPLATES
Report:
https://docs.google.com/document/d/1fNNps7UfgIfoOH8G0ar-5Bzz26-up8Y4/edit
Video & instructions:
https://drive.google.com/file/d/1eb58-dR2yR7Ulc5dQq765uEKmdqVlVhV/view
- In the zip file, check the file named 'AI_Msc2_Video Template. prproj' file, other files are just reference images and videos used for the template.
- Replace the movies to keep the current effects on the video.
- You will see the following titles on the template: '3D Printing', 'Design', 'Node', and 'Robotic Arm': These are just the sections in the template. You can also reach those sections by double-clicking from the general video section, which is 'Movie 1'
- If you do not have the font used on the video on your laptop, upload those to your laptop/computer: settings > control panel > fonts. You(at least Windows users) can copy-paste the font to the 'fonts folder' on your laptop.
Archive:
https://drive.google.com/file/d/1MsjV7GPDhpol1BUl02_tLhqz6iUiKADP/view
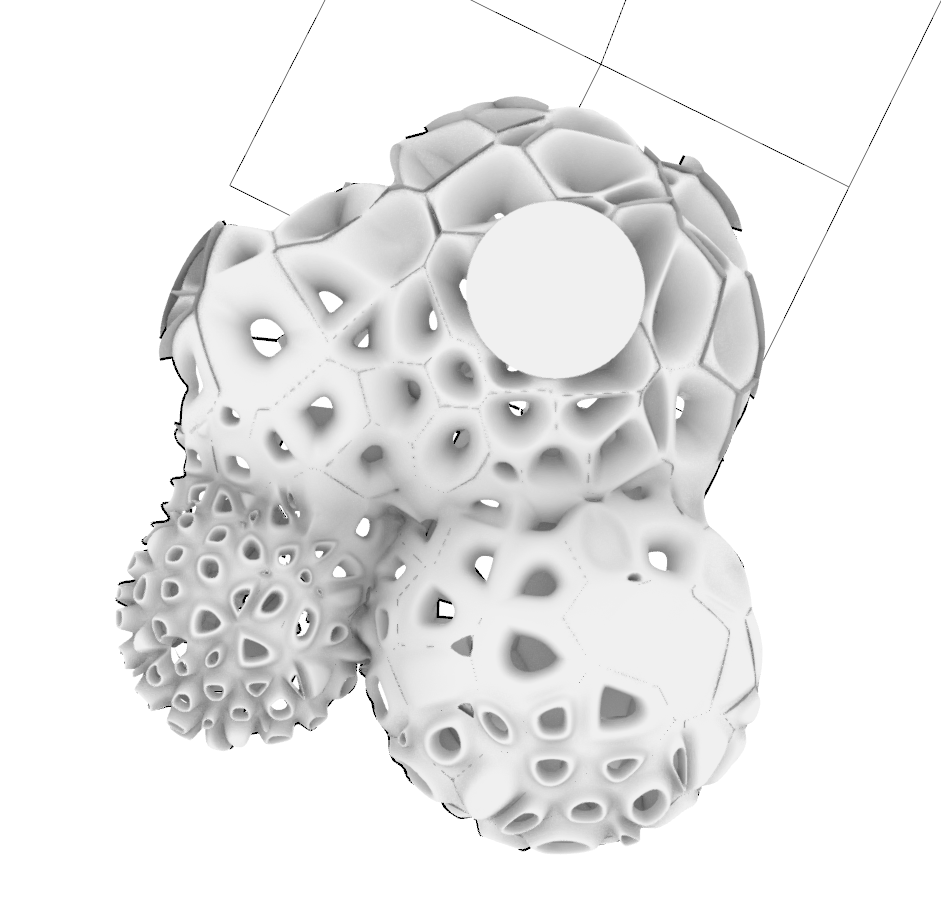
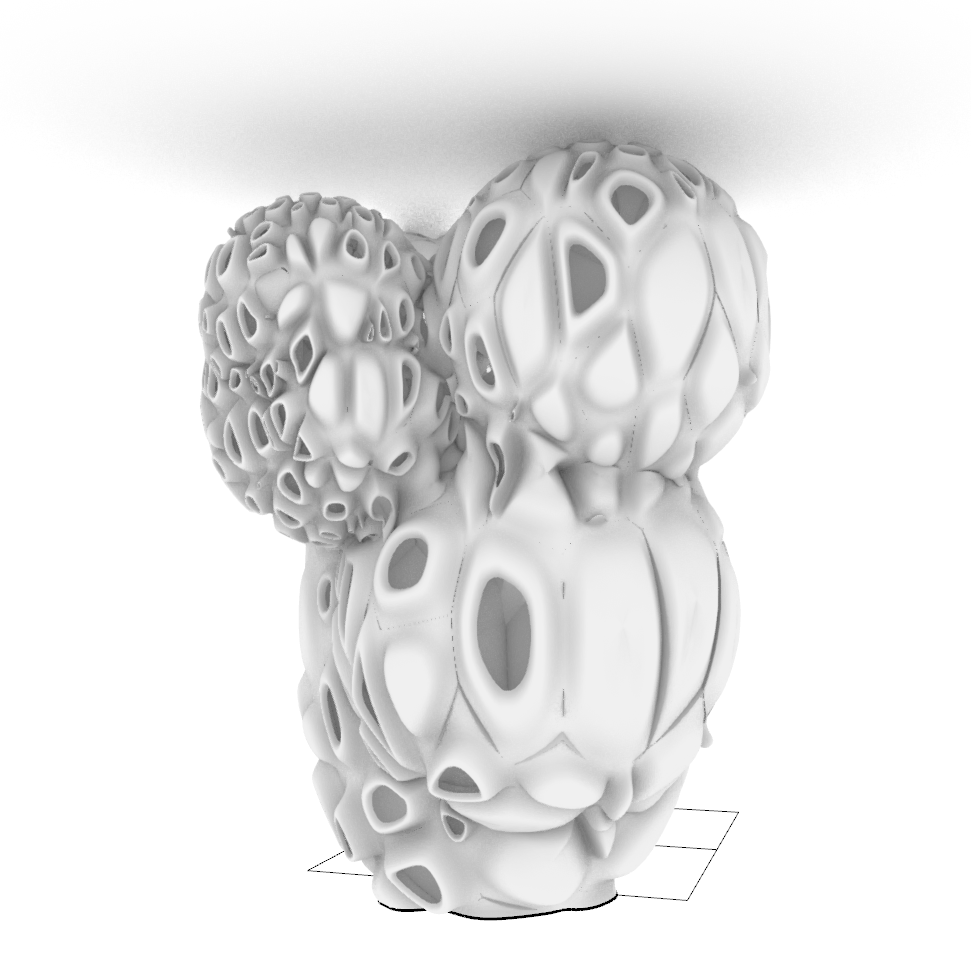
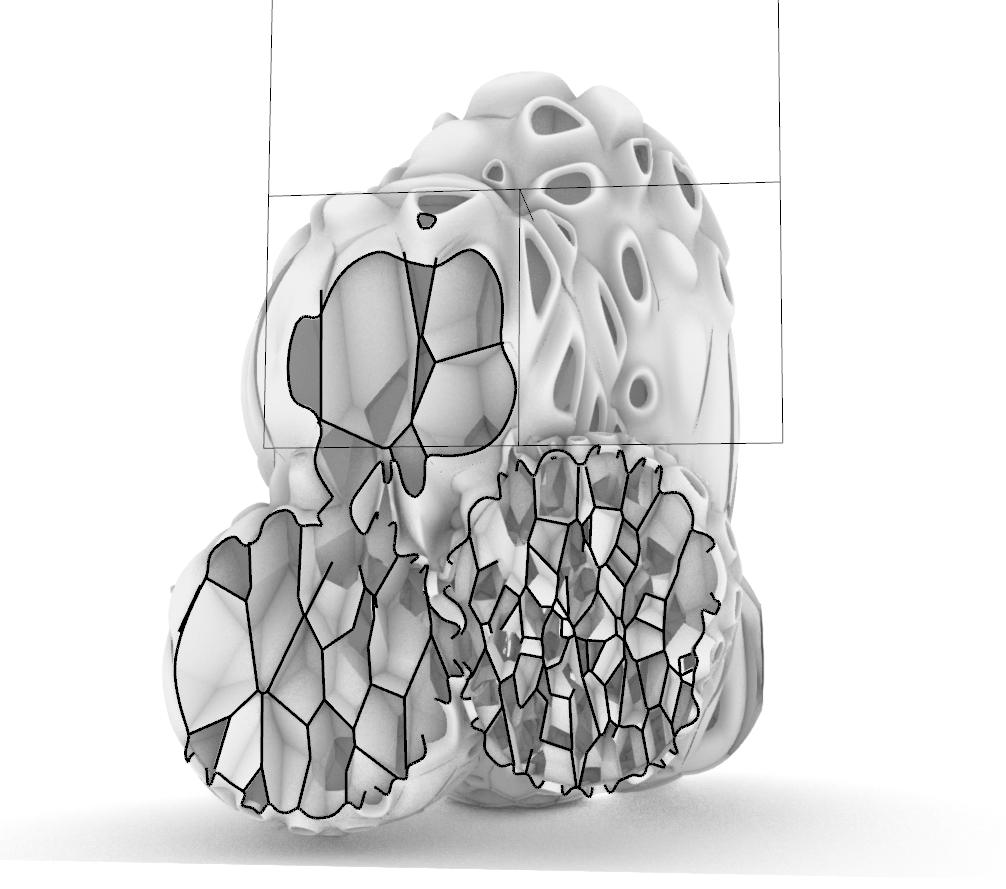
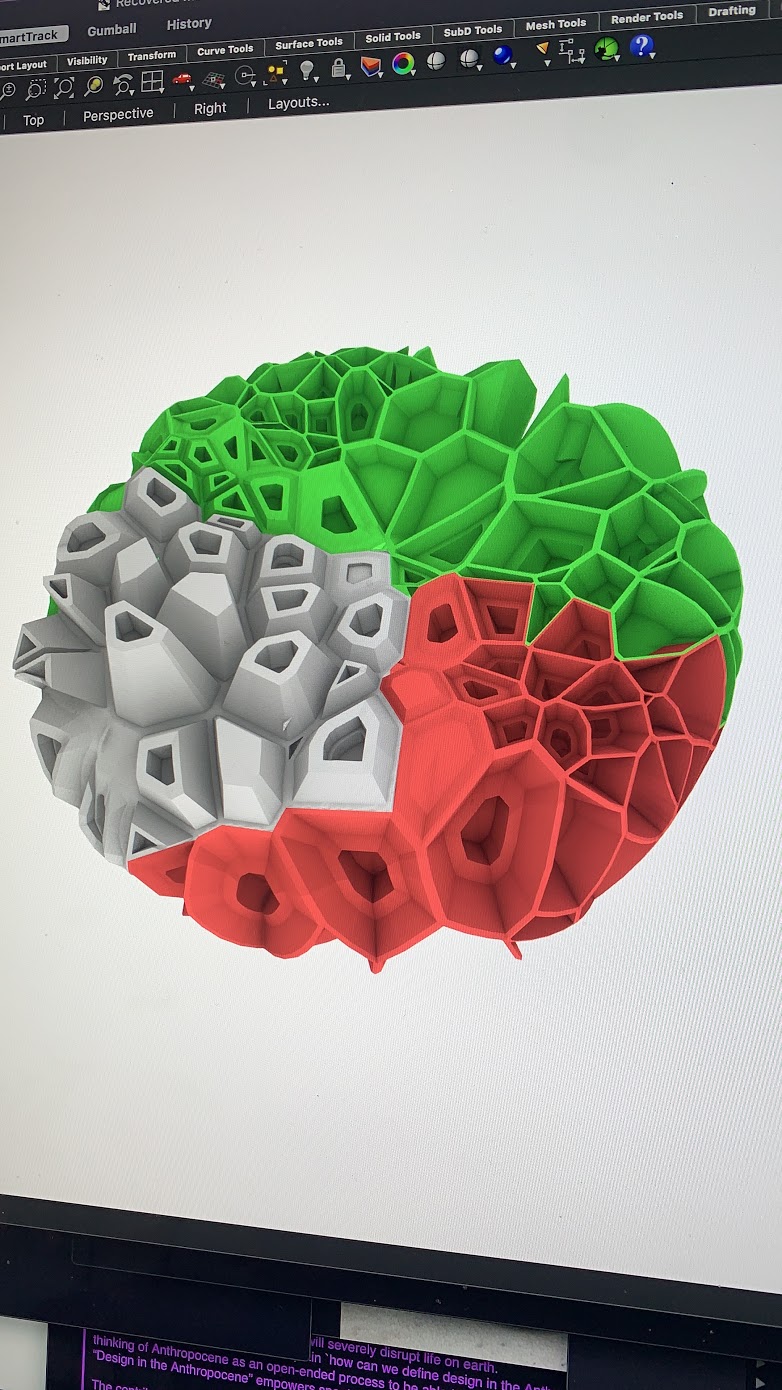
EXAMPLES
Scalable porosity and componential logic: