Difference between revisions of "Shared:WS2024MSc2SAG2HRI"
From cpa
(→HRI) |
(→HRI) |
||
| Line 31: | Line 31: | ||
=='''HRI'''== | =='''HRI'''== | ||
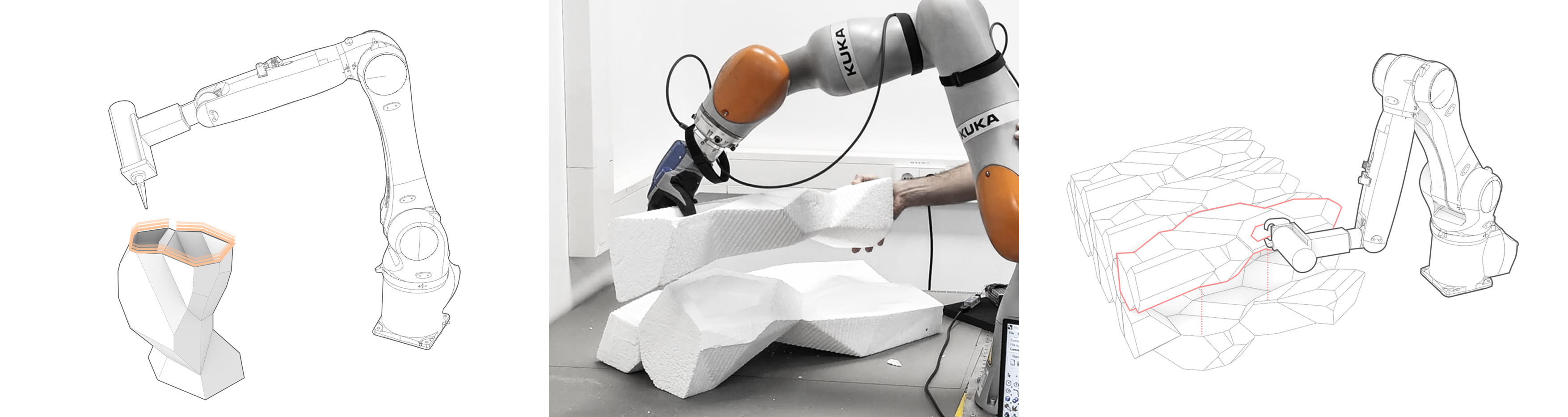
The design is supported by Human-Robot Interaction (HRI) processes. In real life the components would be 3d printed from cementless concrete made out of lunar regolith. For the purpose of prototyping the design we used styrofoam milling. The components were then moved to their final position by a robotic hand supported by humans. It was possible thanks to computer vision, which allowed the robotic hand to pick the right components and identify grabbing holes. Human help in the process included tightening the grip of the robotic hand and a precise guidance in the last steps. | The design is supported by Human-Robot Interaction (HRI) processes. In real life the components would be 3d printed from cementless concrete made out of lunar regolith. For the purpose of prototyping the design we used styrofoam milling. The components were then moved to their final position by a robotic hand supported by humans. It was possible thanks to computer vision, which allowed the robotic hand to pick the right components and identify grabbing holes. Human help in the process included tightening the grip of the robotic hand and a precise guidance in the last steps. | ||
| + | <br> | ||
<br> | <br> | ||
[[File: HRI_pictures.jpg | 850px]] | [[File: HRI_pictures.jpg | 850px]] | ||
Revision as of 02:00, 22 April 2024
Group 2: Marina Kathidjiotis - Katarzyna Prokopiuk - Cătălina Perșunaru - Jan Kwaśnik
HRI
The design is supported by Human-Robot Interaction (HRI) processes. In real life the components would be 3d printed from cementless concrete made out of lunar regolith. For the purpose of prototyping the design we used styrofoam milling. The components were then moved to their final position by a robotic hand supported by humans. It was possible thanks to computer vision, which allowed the robotic hand to pick the right components and identify grabbing holes. Human help in the process included tightening the grip of the robotic hand and a precise guidance in the last steps.
